Зонды и роверы, которые изучают красную планету
Земные роботы на Марсе
Дита Виновска
Журналист DELFI
До момента, когда мы сможем отправить на Марс первых исследователей, еще пройдет какое-то время, а пока остается довольствоваться информацией, которую предоставляют роботы, изучающие Красную планету. Правда, «довольствоваться» – не лучшее определение возможностей механических исследователей Марса. Да, первые отправленные туда зонды могли только сделать снимок, пролетая мимо, а теперь там находятся целые лаборатории, роботы могут слышать, видеть, собирать образцы пород и тщательно исследовать ситуацию на Марсе, а также получать ценную информацию о прошлом планеты. Однако раньше было сложно даже достичь ее орбиты.
О проекте
Это статья в рамках проекта о соседе Земли по Солнечной системе Марсе - об исследованиях, планируемых в будущем миссиях астронавтов, первых поселениях людей и мечтах о терраформировании. В виртуальное путешествие на красную планету мы отвезем тебя в космобусике Delfi. Запрыгивай!

Первые попытки приблизиться к красной планете были предприняты в 60-х годах прошлого века. В борьбу за первенство поначалу ввязались две сверхдержавы – Советский Союз и США. После развала СССР в исследовании Марса доминировали США, а иногда какой-нибудь зонд в направлении планеты отправляли и другие страны, к примеру, Китай, Япония или Объединенные Арабские Эмираты.
Поначалу СССР и США даже не пытались достичь самой планеты, и для исследования Марса использовали зонды, пролетающие мимо него (flyby). Первые две попытки США отправить в космос такого исследователя закончились неудачей еще на этапе запуска. Зонд «Марсник 1» (на Западе известен как «Марс 1960А», «Корабль 4», а в СССР ему дали название «Марс 1М №1») планировали запустить 10 октября 1960 года, но через четыре дня после этого неудачу при запуске потерпел и «Марсник 2» («Марс 1960B, "Марс 1М №2»). Еще два зонда такого же типа СССР пытался запустить осенью 1962 года. И эти попытки закончились неудачей. Правда, «Марс 1» был первым космическим кораблем, который действительно пролетел мимо Марса, несмотря на то, что связь с ним пропала еще до того, как он приблизился к планете. А «Спутнику 22» (названному в СССР «2MV-4 №1) удалось взлететь, но орбиту Земли он не преодолел. Его обломки еще несколько дней находились на орбите, что было зарегистрировано американским радаром на Аляске и интерпретировано как начало атаки советских баллистических ракет.
Поначалу СССР и США даже не пытались достичь самой планеты, и для исследования Марса использовали зонды, пролетающие мимо него (flyby). Первые две попытки США отправить в космос такого исследователя закончились неудачей еще на этапе запуска. Зонд «Марсник 1» (на Западе известен как «Марс 1960А», «Корабль 4», а в СССР ему дали название «Марс 1М №1») планировали запустить 10 октября 1960 года, но через четыре дня после этого неудачу при запуске потерпел и «Марсник 2» («Марс 1960B, "Марс 1М №2»). Еще два зонда такого же типа СССР пытался запустить осенью 1962 года. И эти попытки закончились неудачей. Правда, «Марс 1» был первым космическим кораблем, который действительно пролетел мимо Марса, несмотря на то, что связь с ним пропала еще до того, как он приблизился к планете. А «Спутнику 22» (названному в СССР «2MV-4 №1) удалось взлететь, но орбиту Земли он не преодолел. Его обломки еще несколько дней находились на орбите, что было зарегистрировано американским радаром на Аляске и интерпретировано как начало атаки советских баллистических ракет.
Путь к первому полету мимо Марса
1960 год
1960 год
10 октября
Миссия: Марс 1M №1 (Марс 1960A)
Страна: СССР
Потерпел неудачу при запуске
Страна: СССР
Потерпел неудачу при запуске
14 октября
Миссия: Марс 1M №2 (Марс 1960В)
Страна: СССР
Потерпел неудачу при запуске
Страна: СССР
Потерпел неудачу при запуске
1962 год
1962 год
24 октября
Миссия: 2MВ-4 №1 (Спутник 22 )
Страна: СССР
Не смог покинуть орбиту Земли
Страна: СССР
Не смог покинуть орбиту Земли
1 ноября
Миссия: Марс 1 (Спутник 23)
Страна: СССР
Пролетел около Марса, но с ним была нарушена связь
Страна: СССР
Пролетел около Марса, но с ним была нарушена связь
1964 год
1964 год
5 ноября
Миссия: Mariner 3
Страна: США
Сбился с курса и отправился в другом направлении.
28 ноября
Миссия: Mariner 4
Страна: США
Миссия выполнена, впервые получены изображения Марса с близкого расстояния
Страна: США
Миссия выполнена, впервые получены изображения Марса с близкого расстояния
Фото: NASA
Первым зондом, который успешно приблизился к Марсу, можно считать запущенный США Mariner 4. Этот зонд поднялся в воздух 28 ноября 1964 года – через три недели после того, как у Mariner 3 не раскрылись панели солнечных батарей и он сбился с назначенного курса на Марс.
Марс вблизи: изображения, которые получил Mariner 4
Затем последовало еще несколько попыток приблизиться к Марсу. СССР это удалось только в 1973 году. В рамках этих попыток планировалось посадить один зонд на Марсе, а другой сделать искусственным спутником планеты.
Уже в то время, когда зонды, несмотря на сближение с Марсом, не могли сделать снимков с близкого расстояния, большие страны разработали зонды нового типа – и те, что можно посадить на поверхности красной планеты (lander), и те, целью которых было стать ее искусственным спутником (orbiter). С развитием технологий зонды, пролетающие мимо планеты, перестали быть актуальны. Последние два зонда, которые пролетели мимо Марса, должны были стать его искусственными спутниками (зонд «Марс 4») или высадиться на нем (зонд «Марс 7»). Их запустил СССР 21 июля и 9 августа 1974 года.
В борьбе за то, кто первым высадит свой зонд на Марс, выиграл СССР. Также СССР первым отправил на планету зонд, который стал ее искусственным спутником. Эти цели были достигнуты в 1971 году, в рамках миссий «Марс 2» и «Марс 3». В рамках обеих миссий на красную планету отправляли как искусственный спутник, так и зонд, который должен был высадиться на ее поверхность, а также небольшого робота, способного передвигаться – марсоход с названием "ПрОП-М». Так как связь с высаженным во время миссии «Марс-3» зондом вскоре была нарушена, где сейчас находится ровер, неизвестно. Благодаря обеим миссиям исследователи получили очень много ценной информации о Марсе: удалось определить примерную температуру планеты, атмосферное давление, плотность реголита и проводимость в определенных местах. Также была получена информация об аномалии тепловых потоков на поверхности Марса.
Уже в то время, когда зонды, несмотря на сближение с Марсом, не могли сделать снимков с близкого расстояния, большие страны разработали зонды нового типа – и те, что можно посадить на поверхности красной планеты (lander), и те, целью которых было стать ее искусственным спутником (orbiter). С развитием технологий зонды, пролетающие мимо планеты, перестали быть актуальны. Последние два зонда, которые пролетели мимо Марса, должны были стать его искусственными спутниками (зонд «Марс 4») или высадиться на нем (зонд «Марс 7»). Их запустил СССР 21 июля и 9 августа 1974 года.
В борьбе за то, кто первым высадит свой зонд на Марс, выиграл СССР. Также СССР первым отправил на планету зонд, который стал ее искусственным спутником. Эти цели были достигнуты в 1971 году, в рамках миссий «Марс 2» и «Марс 3». В рамках обеих миссий на красную планету отправляли как искусственный спутник, так и зонд, который должен был высадиться на ее поверхность, а также небольшого робота, способного передвигаться – марсоход с названием "ПрОП-М». Так как связь с высаженным во время миссии «Марс-3» зондом вскоре была нарушена, где сейчас находится ровер, неизвестно. Благодаря обеим миссиям исследователи получили очень много ценной информации о Марсе: удалось определить примерную температуру планеты, атмосферное давление, плотность реголита и проводимость в определенных местах. Также была получена информация об аномалии тепловых потоков на поверхности Марса.
Видеоверсия: как должны были
выглядеть посадка зондов "Марс 2" и "Марс 3" и запуск ровера
выглядеть посадка зондов "Марс 2" и "Марс 3" и запуск ровера
В 1971 году США тоже удалось запустить зонд, который вышел на орбиту Марса и по прежнему обращается вокруг него. Первый зонд на поверхность Марса США высадили только в 1975 году.
Путь к орбите и поверхности Марса
1962 год
1962 год
4 ноября
Миссия: Марс 2MВ-3 №1 (Спутник 24)
Страна: США
Цель: высадиться на Марсе
Потерпел неудачу в начале пути на Марс, обломки оказались в атмосфере Земли
Страна: США
Цель: высадиться на Марсе
Потерпел неудачу в начале пути на Марс, обломки оказались в атмосфере Земли
1969 год
1969 год
27 марта
Миссия: Марс 2M №521 (Марс 1969A)
Страна: СССР
Цель: попасть на орбиту Марса
Потерпел неудачу при запуске
Страна: СССР
Цель: попасть на орбиту Марса
Потерпел неудачу при запуске
2 апреля
Миссия: Марс 2M №522 (Марс 1969В)
Страна: США
Цель: попасть на орбиту Марса
Потерпел неудачу при запуске
Страна: США
Цель: попасть на орбиту Марса
Потерпел неудачу при запуске
1971 год
1971 год
10 мая
Миссия: Космос 419 (3МS №170)
Страна: СССР
Цель: попасть на орбиту Марса и высадиться на его поверхности
Ошибка при установке верхней границы таймера. Зонд вернулся в атмосферу Земли
Страна: СССР
Цель: попасть на орбиту Марса и высадиться на его поверхности
Ошибка при установке верхней границы таймера. Зонд вернулся в атмосферу Земли
19 мая
Миссия: Марс 2
Страна: СССР
Цель: попасть на обриту Марса и высадиться на его поверхности
Миссия искусственного спутника была выполнена, но зонд, который должен был высадиться на планете, потерпел аварию при попытке это сделать
Страна: СССР
Цель: попасть на обриту Марса и высадиться на его поверхности
Миссия искусственного спутника была выполнена, но зонд, который должен был высадиться на планете, потерпел аварию при попытке это сделать
28 мая
Миссия: Марс 3
Страна: СССР
Цель: попасть на орбиту Марса и высадиться на его поверхности, а также высадить первый ровер
Миссия выполнена, данных о ровере нет из-за нарушенной связи с зондом на Марсе
Страна: СССР
Цель: попасть на орбиту Марса и высадиться на его поверхности, а также высадить первый ровер
Миссия выполнена, данных о ровере нет из-за нарушенной связи с зондом на Марсе
Фото: NASA
Несмотря на то, что технически первые роботы-исследователи или роверы высадились на поверхность Марса во время советской миссии «Марс 3», США можно считать страной, лидирующей в плане «исследователей» этого типа – пять из шести миссий с роверами – заслуга США. Один ровер отправил Китай, а седьмой будет запущен в рамках программы ExoMars 2022 Европейским космическим агентством (ЕКА).
Первой миссией с использованием ровера была реализованная США Mars Pathfinder. 4 декабря 1996 года в путь отправился ровер, весящий чуть больше 10 килограммов, а также зонд весом 264 килограмма, которому было дано то же название, что и самой миссии. Он приземлился на Марсе спустя 7 месяцев и почти 10 часов. Ровер Sojourner работал на солнечных батареях. Миссия была завершена 27 сентября того же года из-за того, что с зондом была потеряна связь – ее безуспешно пытались восстановить вплоть до марта 1997 года.
Первой миссией с использованием ровера была реализованная США Mars Pathfinder. 4 декабря 1996 года в путь отправился ровер, весящий чуть больше 10 килограммов, а также зонд весом 264 килограмма, которому было дано то же название, что и самой миссии. Он приземлился на Марсе спустя 7 месяцев и почти 10 часов. Ровер Sojourner работал на солнечных батареях. Миссия была завершена 27 сентября того же года из-за того, что с зондом была потеряна связь – ее безуспешно пытались восстановить вплоть до марта 1997 года.
Как выглядели зонд и ровер миссии Mars Pathfinder
На данный момент было реализовано шесть миссий, в рамках которых роверы отправились на красную планету, а следующее путешествие на Марс планируется начать в 2022 году. В феврале 2021 года произошла успешная посадка на Марс ровера Perserverance.
Осуществленные и запланированные миссии с роверами
1996 год
1996 год
4 декабря
Миссия: Mars Pathfinder
Страна: США
Зонд и ровер "Sojourner"
Страна: США
Зонд и ровер "Sojourner"
2003 год
2003 год
10 июня
Миссия: Spirit (MER-A)
Страна: США
Марсоход
Страна: США
Марсоход
8 июля
Миссия: Opportunity (MER-B)
Страна: США
Марсоход
Страна: США
Марсоход
2011 год
2011 год
26 ноября
Миссия: Mars Science Laboratory
Страна: США
Марсоход Curiosity
Страна: США
Марсоход Curiosity
2020 год
2020 год
23 июля
Миссия: Tianwen 1
Страна: Китай
Марсоход и искусственный спутник планеты
Страна: Китай
Марсоход и искусственный спутник планеты
30 июля
Миссия: Mars 2020
Страна: США
Марсоход Perserverance и дрон Ingenuity
Страна: США
Марсоход Perserverance и дрон Ingenuity
2022 год
2022 год
Август - октябрь
Миссия: ExoMars 2022
Европейское космическое агентство
Марсоход (ESA) и исследовательская платформа на поверхности планеты (Россия)
Европейское космическое агентство
Марсоход (ESA) и исследовательская платформа на поверхности планеты (Россия)
Фото: NASA
Последний ровер, запущенный на Марс, отправился туда в рамках миссии США Mars 2020. Он называется Perseverance, что значит "настойчивость". Марсоход будет искать на планете доказательства, что когда-то там существовала жизнь, а также протестирует несколько новых исследовательских инструментов, один из них – небольшой дрон.
На изображении ниже можно рассмотреть «настойчивый» марсоход и его исследовательское оборудование подробно
На изображении ниже можно рассмотреть «настойчивый» марсоход и его исследовательское оборудование подробно
Корпус и «мозги».
Деятельность ровера обеспечивает его процессор, который защищен корпусом – его можно назвать «телом» робота. Его размеры составляют 3х2,7х2,2 метра, а вес – 1025 килограммов.
Деятельность ровера обеспечивает его процессор, который защищен корпусом – его можно назвать «телом» робота. Его размеры составляют 3х2,7х2,2 метра, а вес – 1025 килограммов.
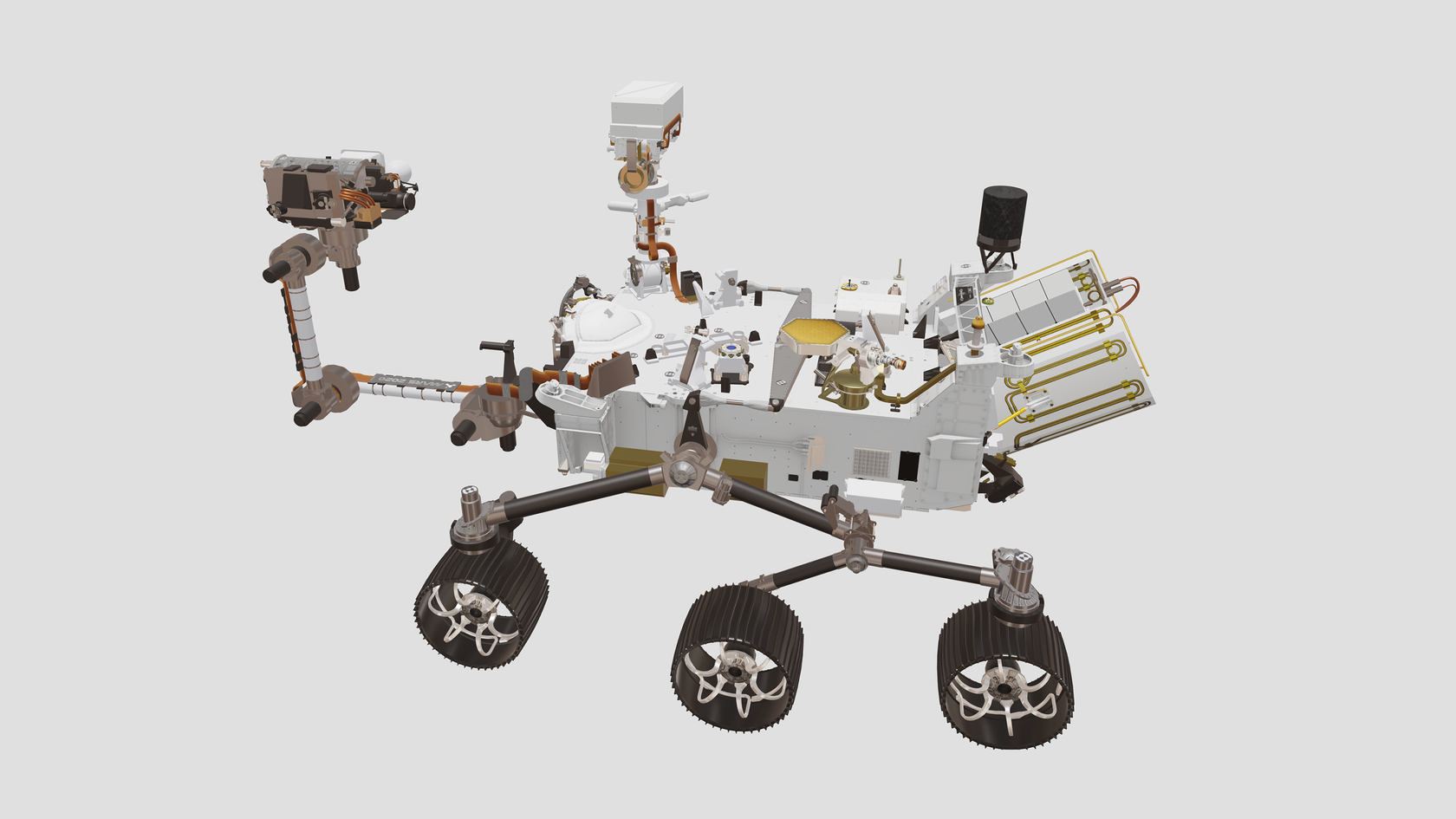
Камера и микрофон.
Благодаря этому устройству исследуют горные породы на Марсе. С расстояния до семи метров с помощью лазера можно исследовать небольшие частички пород. Спектрометры устройства способны исследовать химический состав горных пород. Рядом с этой камерой расположены еще четыре: две из них отвечают за навигацию (Navcam), а две (Mastcam-Z) делают красочные снимки и записывают трехмерные видеоматериалы со звуком.
Благодаря этому устройству исследуют горные породы на Марсе. С расстояния до семи метров с помощью лазера можно исследовать небольшие частички пород. Спектрометры устройства способны исследовать химический состав горных пород. Рядом с этой камерой расположены еще четыре: две из них отвечают за навигацию (Navcam), а две (Mastcam-Z) делают красочные снимки и записывают трехмерные видеоматериалы со звуком.
«Рука и ладонь» робота. «Рука» марсохода – 2 метра и 10 сантиметров в длину. У нее есть и «плечевой сустав», и «локтевой сустав», а также особый сустав для того, чтобы ровер мог шевелить «ладонью». В «ладони» марсоход держит камеры, анализаторы пород и химических веществ, которые ищут доказательства того, что на Марсе существовала жизнь. Также ровер способен собирать и переносить ценные образцы с поверхности Марса. Также в «ладони» находится сверло, которое способно просверлить отверстия диаметром в три сантиметра и собрать образцы пород с Марса.
Шерлок и Ватсон. Камеры находятся в «ладони» ровера и исследуют марсианские породы вблизи. Используя лазер, камеру и спектрометр, устройство ищет породы и свидетельства существования органических веществ, которые могли бы доказать наличие микробиологической жизни на планете. Такая же задача стоит перед третьей камерой, которая называется PXL.
Система электроснабжения.
Ровер приводят в действие радиоизотопные источники энергии, которые весят 45 килограммов. Они содержат примерно 4,6 килограмма диоксида плутония, который обеспечивает равномерную подачу энергии. Система электроснабжения такая же, как на ровере Curiosity.
Ровер приводят в действие радиоизотопные источники энергии, которые весят 45 килограммов. Они содержат примерно 4,6 килограмма диоксида плутония, который обеспечивает равномерную подачу энергии. Система электроснабжения такая же, как на ровере Curiosity.
Система коммуникации.
У ровера три антенны, которые с помощью искусственных спутников Марса или без них обеспечивают коммуникацию с Землей. Через эти каналы информация и посылается, и получается.
У ровера три антенны, которые с помощью искусственных спутников Марса или без них обеспечивают коммуникацию с Землей. Через эти каналы информация и посылается, и получается.
Корпус и «мозги».
Деятельность ровера обеспечивает его процессор, который защищен корпусом – его можно назвать «телом» робота. Его размеры составляют 3х2,7х2,2 метра, а вес – 1025 килограммов.
Деятельность ровера обеспечивает его процессор, который защищен корпусом – его можно назвать «телом» робота. Его размеры составляют 3х2,7х2,2 метра, а вес – 1025 килограммов.
Камера и микрофон.
Благодаря этому устройству исследуют горные породы на Марсе. С расстояния до семи метров с помощью лазера можно исследовать небольшие частички пород. Спектрометры устройства способны исследовать химический состав горных пород. Рядом с этой камерой расположены еще четыре: две из них отвечают за навигацию (Navcam), а две (Mastcam-Z) делают красочные снимки и записывают трехмерные видеоматериалы со звуком.
Благодаря этому устройству исследуют горные породы на Марсе. С расстояния до семи метров с помощью лазера можно исследовать небольшие частички пород. Спектрометры устройства способны исследовать химический состав горных пород. Рядом с этой камерой расположены еще четыре: две из них отвечают за навигацию (Navcam), а две (Mastcam-Z) делают красочные снимки и записывают трехмерные видеоматериалы со звуком.
«Рука и ладонь» робота. «Рука» марсохода – 2 метра и 10 сантиметров в длину. У нее есть и «плечевой сустав», и «локтевой сустав», а также особый сустав для того, чтобы ровер мог шевелить «ладонью». В «ладони» марсоход держит камеры, анализаторы пород и химических веществ, которые ищут доказательства того, что на Марсе существовала жизнь. Также ровер способен собирать и переносить ценные образцы с поверхности Марса. Также в «ладони» находится сверло, которое способно просверлить отверстия диаметром в три сантиметра и собрать образцы пород с Марса.
Шерлок и Ватсон. Камеры находятся в «ладони» ровера и исследуют марсианские породы вблизи. Используя лазер, камеру и спектрометр, устройство ищет породы и свидетельства существования органических веществ, которые могли бы доказать наличие микробиологической жизни на планете. Такая же задача стоит перед третьей камерой, которая называется PXL.
Система электроснабжения.
Ровер приводят в действие радиоизотопные источники энергии, которые весят 45 килограммов. Они содержат примерно 4,6 килограмма диоксида плутония, который обеспечивает равномерную подачу энергии. Система электроснабжения такая же, как на ровере Curiosity.
Ровер приводят в действие радиоизотопные источники энергии, которые весят 45 килограммов. Они содержат примерно 4,6 килограмма диоксида плутония, который обеспечивает равномерную подачу энергии. Система электроснабжения такая же, как на ровере Curiosity.
Система коммуникации.
У ровера три антенны, которые с помощью искусственных спутников Марса или без них обеспечивают коммуникацию с Землей. Через эти каналы информация и посылается, и получается.
У ровера три антенны, которые с помощью искусственных спутников Марса или без них обеспечивают коммуникацию с Землей. Через эти каналы информация и посылается, и получается.
Марсоходы, отправленные США исследовать красную планету
Источники →
Источники: